News et tests de Quadricopt�res


Voici un Blade 350 QX2 FPV double caméra + GoPro, autant dire un multi-rotors qui va permettre de voler en immersion et regarder aussi bien devant qu’au dessous tout en filmant avec la GoPro…
Double caméra FPV sur 350 QX2
Je vous présente ci-dessous les modifications réalisées sur mon 350 QX2. Le vol en immersion (FPV)
Pour bien comprendre ce qu’est le FPV et les composantes nécessaire (voir cet article)
Voici mon premier setup FPV (visible ici)
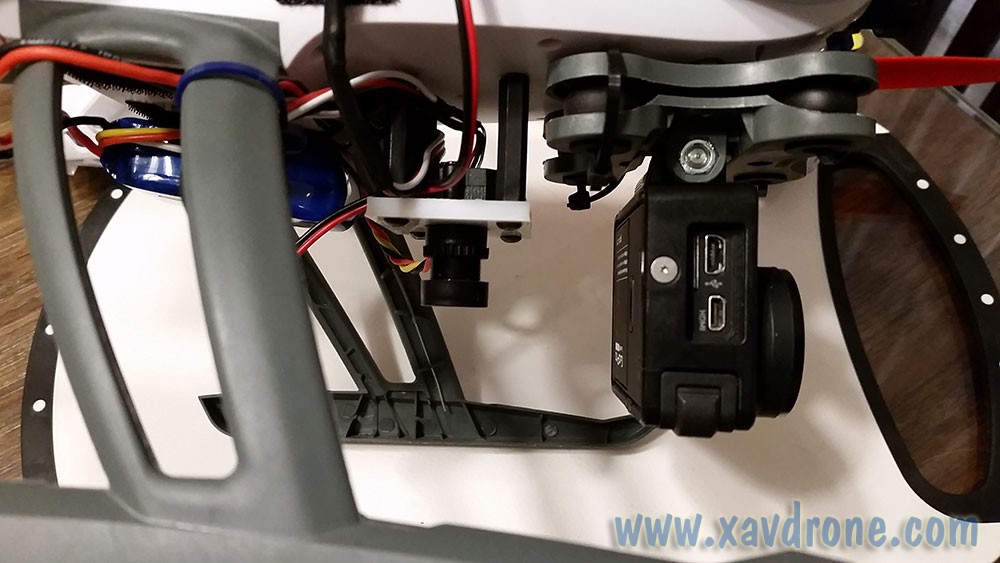
Mon setup à maintenant évolué avec l’intégration de la camera dans le nez du modèle

et le transmetteur vidéo (vTx) sur le dessus du 350 QX

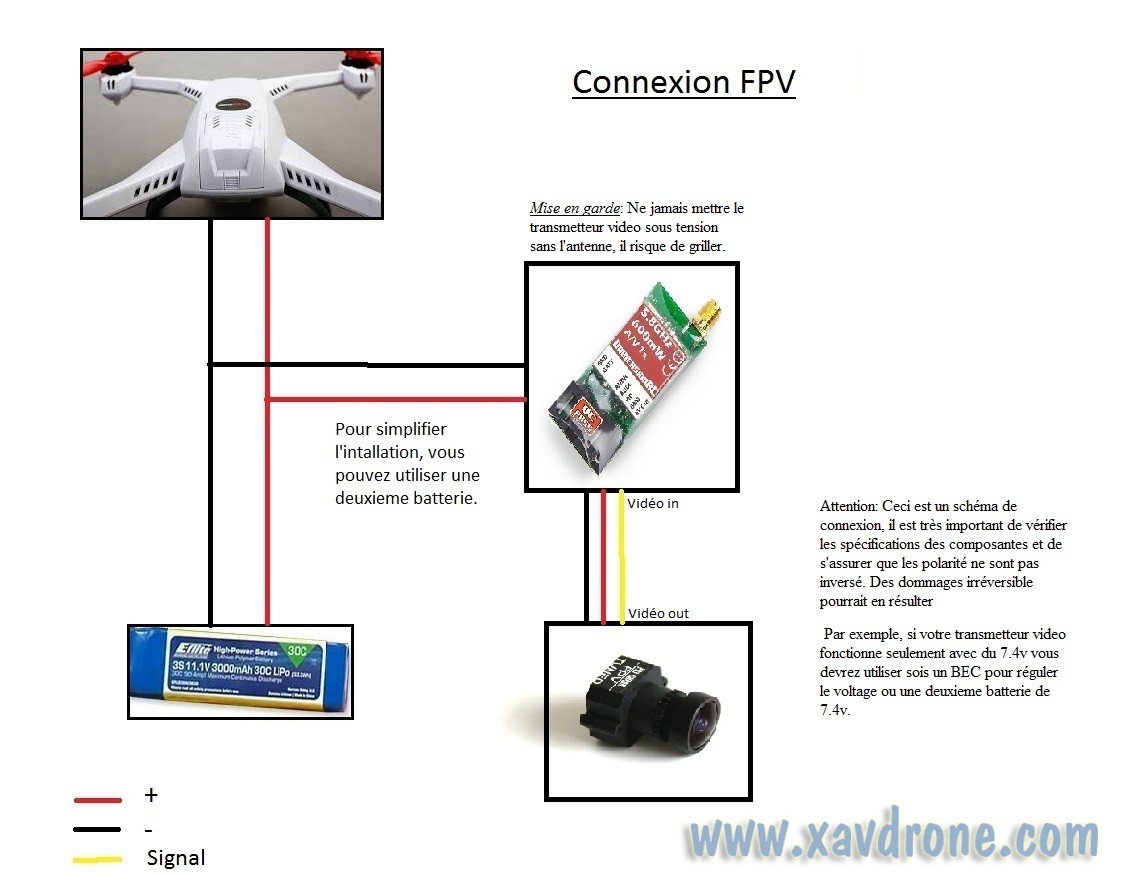
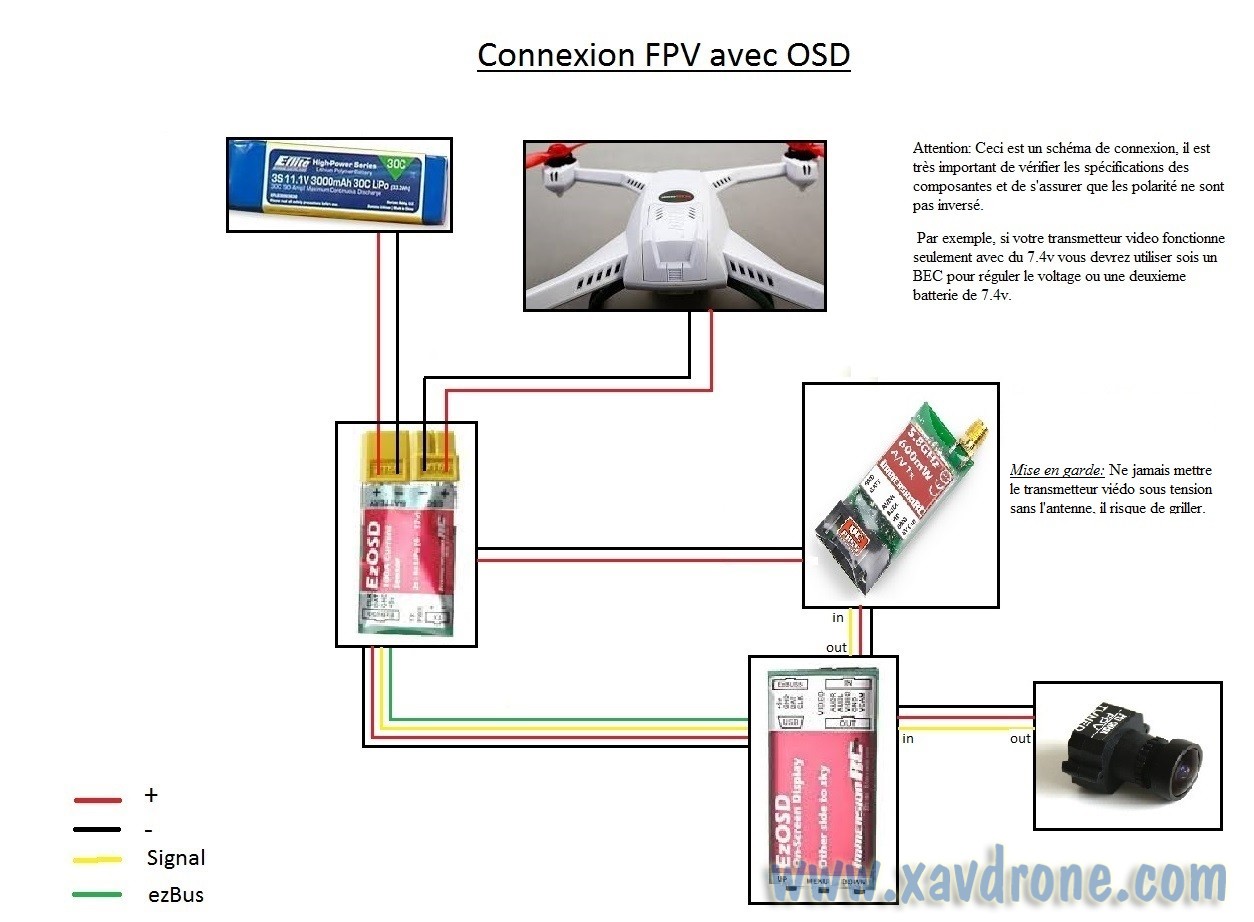
Voici un schéma de connexion pour les composantes FPV
Voir sous le Multi Rotor en FPV
L’angle de vision en FPV au moment de l’atterrissage et pour faire du stationnaire est insuffisant et cela rend ces manœuvres difficiles. Je propose comme solution une deuxième caméra qui « regarde » sous le modèle.
Pour réaliser cette configuration sur un modèle déjà équipé en FPV, vous aurez besoin d’une deuxième caméra (la 600 TVL FPV de Fat Shark visible ici)

d’un switch vidéo
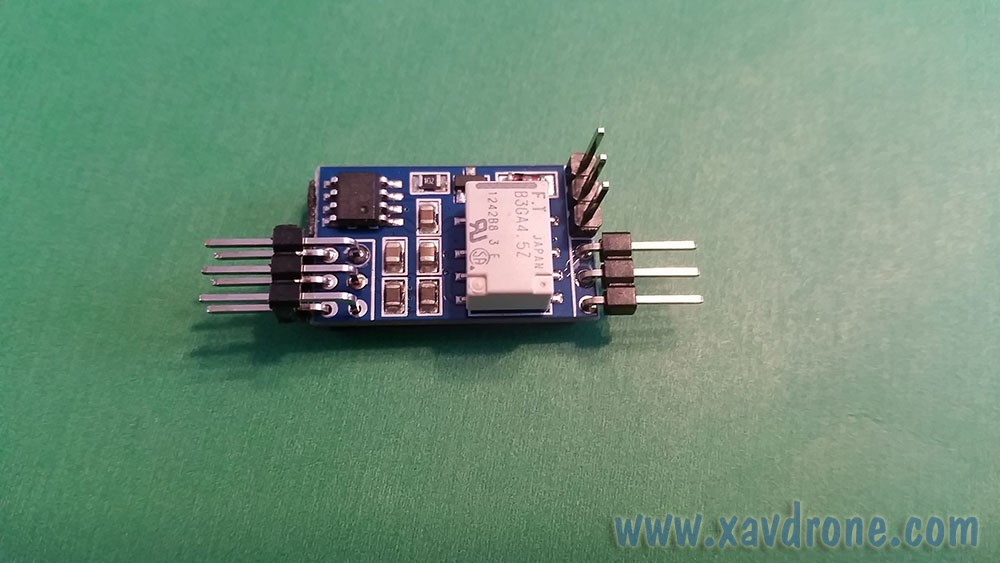
qui sera contrôlé par une voie (libre) de votre radio. Vous devrez réaliser vous-même le câblage et trouver un moyen de fixer cette nouvelle caméra sous le modèle.
Présentation de mon setup :
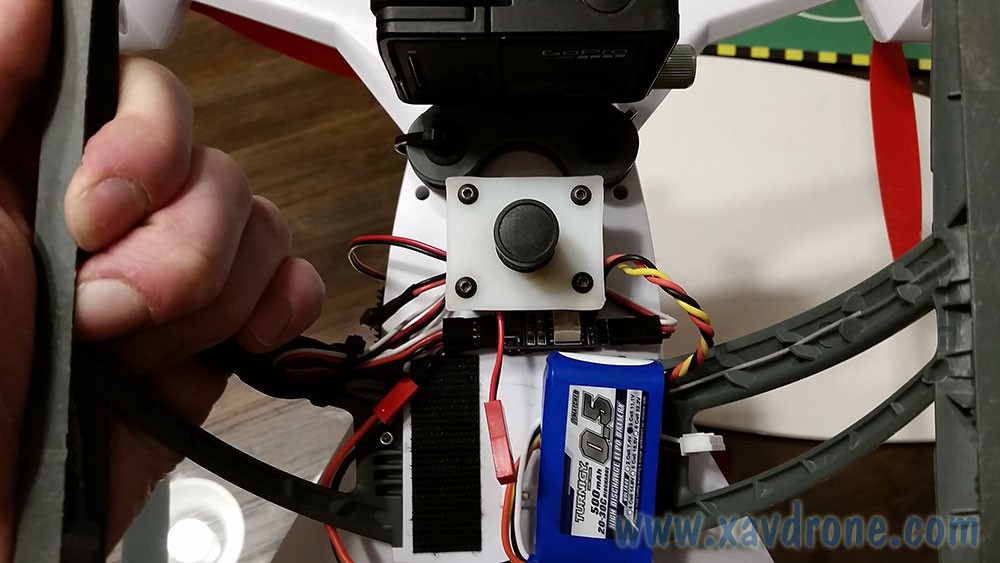
Sur un BLADE 350 QX2, pour fixer la caméra, j’ai réalisé avec une imprimante 3D une petite plateforme que j’ai fixée sous le modèle à l’aide d’entretoises M3 en nylon coupées à la longueur et à l’angle voulu.
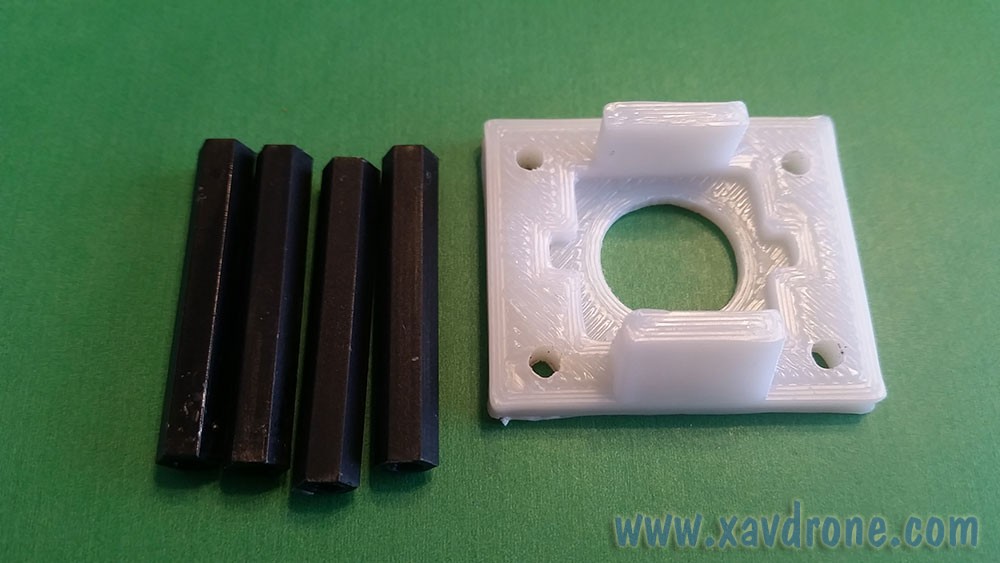
L’ensemble est fixé au modèle en perçant 4 trous dans le châssis

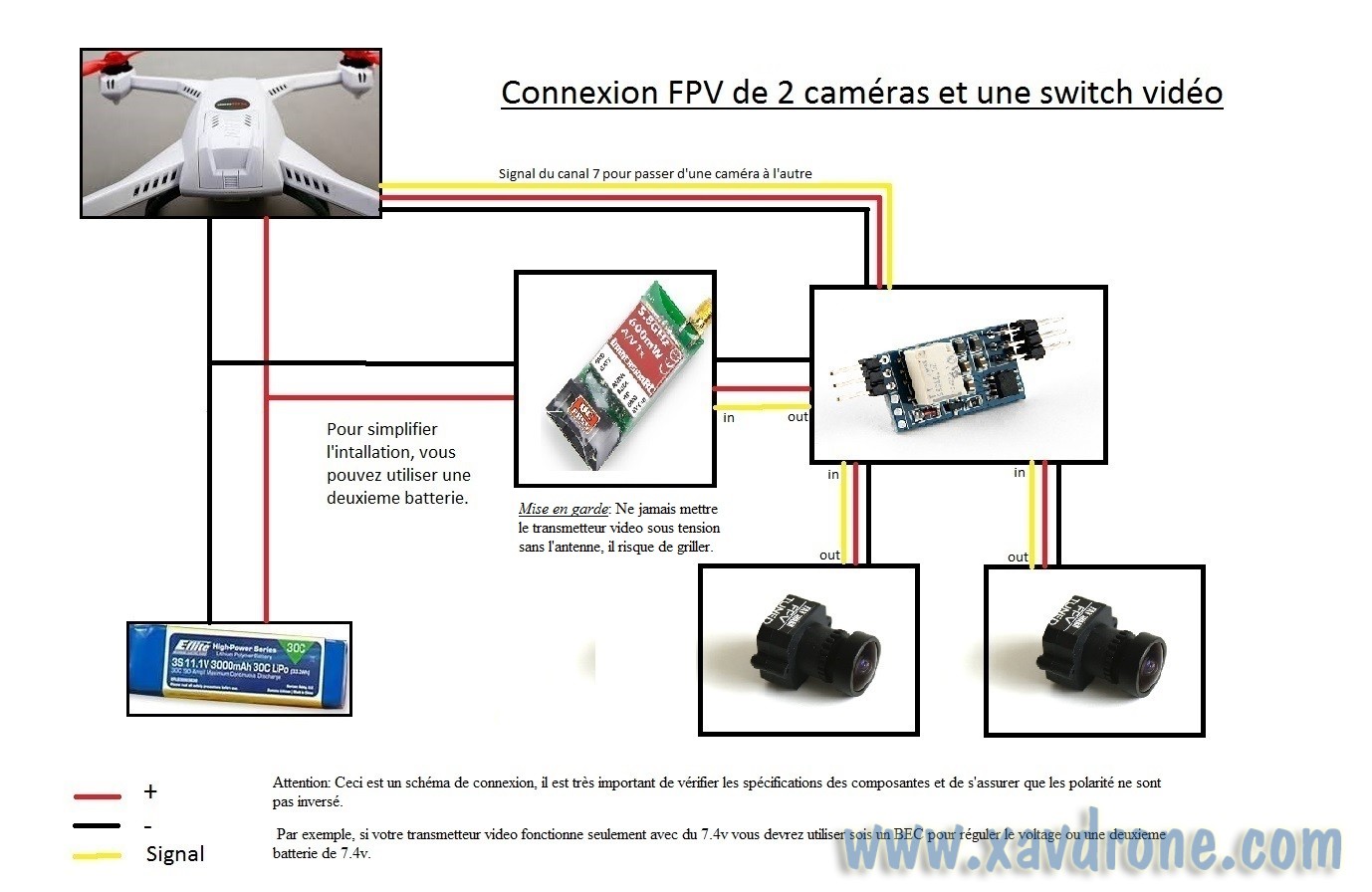
J’ai programmé la 7ème voie sur ma radio, elle servira à commander le Switch vidéo qui est connecté sur les « pins » à gauche de la batterie

Voici le schéma de connexion
Photos du montage

L’installation d’un OSD
Un OSD, « On Screen Display », diffuse en temps réel les données de vol en surimpression de l’image dans les lunettes ou écrans FPV. Ainsi on peut avoir un retour d’information sur les coordonnées GPS, l’altitude, la vitesse verticale et horizontale, la tension et l’intensité de la batterie, le temps de vol, la distance parcourue, orientation la position du point départ, le signal RSSI, etc.…
Il existe toute une gamme d’OSD, souvent, le prix croit avec la quantité de données disponible.
Voici à quoi peut ressembler l’affichage des données (exemple OSD)

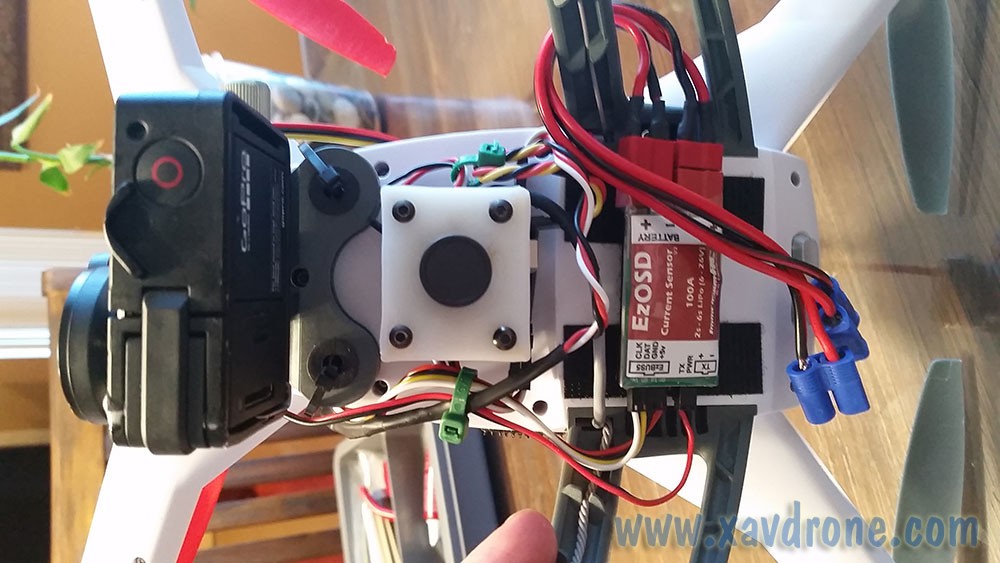
J’ai choisi le ezOSD de « immersion RC »
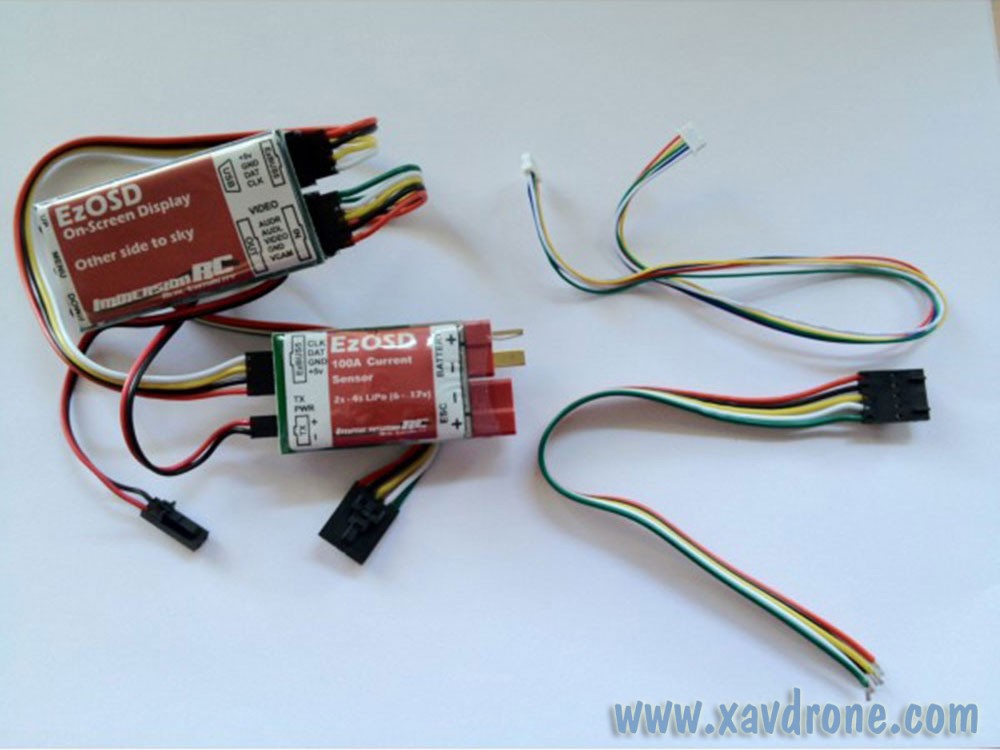
il est presque « plug and play » il manque seulement les fils de connexion batterie-OSD et OSD-multi-rotors
L’installation est assez simple, j’utilise du velcro





Voici le schéma de connexion

Voici le résultats final


Pour d’autres détails et voir le résultat, voir le vidéo ci-dessous

Habite au Canada et assez loin de Julie pour que Xav ne soit pas effrayé, j'aime réaliser des tutos vidéos, je vol en immersion et suis dans un club d'aéromodélisme
Website: → Forum FAQ Drone
Connect


Une réponse à Double caméra FPV sur 350 QX2
![]()
acheter un drone




Voitures RC

Livre

salut
ouaouuuuuuuuuuu!! ❗ ❗ ❗ ❗
s’est du bon boulot mon gars ,
comme tu dis ………s’est pas plus compliquer qu’ça 💡 🙄 🙄
ben dit donc , jolie modif 💡
ça fait du bazar tout ça !
ça doit être cool les vidéos sous différents angles de vue
j’adore !! ça fait usine à gaz , le quad , il reste toujours aussi équilibré ?
n’ y a t’il pas une personne qui a une imprimante 3 D sur le fofo pour faire 1 capot de toit ou sous la coque pour planquer toute la fillasse, et l’ électronique ??
en tout cas , s’est top avec OSD , ça doit être plus pratique pour le vol en Immersion, les distances sont indiquées !!